
Le GNSS
Texte inspiré de l’étude d’impact d’une altération du GNSS réalisée par FDC
Qu’est-ce que le GNSS ?
Principes de fonctionnement
1. Composantes des systèmes GNSS

Un système GNSS est composé de trois segments comme illustré sur la Figure 1 ci-dessous.
- Le segment spatial désigne les constellations de satellites transmettant en continu des signaux de mesure de distances dans l’espace (SiS) ;
- Le segment sol suit les satellites et leur transfère régulièrement des informations sur leurs positionnements ainsi que des corrections à destination de leurs horloges atomiques (raccordement de chaque horloge satellite à l’échelle de temps globale de la constellation GNSS). Les informations de positionnement des satellites sont ensuite datées et transmises aux utilisateurs sous forme de « messages de navigation » intégrés aux SiS ;
- Le segment utilisateur désigne les récepteurs utilisant les signaux envoyés par les satellites (SiS) afin de calculer leurs données de Positions, de Vitesse et de Temps (PVT).
2. Principes de positionnement et d’estimation du temps par GNSS
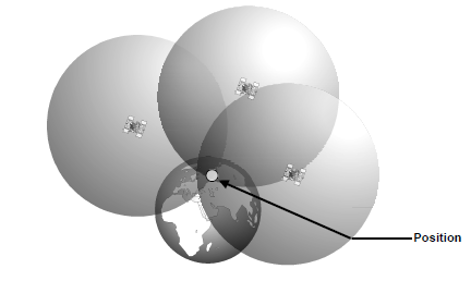
La localisation par GNSS repose sur le principe de triangulation basé sur une estimation des distances séparant le récepteur de chacun des satellites visibles. Ces distances sont obtenues à partir du calcul du temps séparant l’émission et la réception d’un signal satellitaire, sachant que ce dernier se propage à la vitesse de la lumière. Pour calculer sa position, l’utilisateur doit donc également avoir connaissance du temps GNSS utilisé par les satellites.
Une mesure GNSS consiste donc à calculer quatre variables : les trois variables de position du récepteur plus l’écart de temps entre la référence du récepteur et l’horloge embarquée à bord du satellite. Quatre satellites sont donc à minima nécessaires pour réaliser une mesure GNSS.
On notera que si on considère connue la différence de référence temporelle du récepteur et des satellites, trois satellites suffisent pour positionner l’utilisateur. Même si trois sphères s’interceptent en deux points distincts, une des solutions peut toujours être invalidée car la position ou la vitesse qui lui sont associées peuvent être considérées comme aberrantes (non positionnée sur la surface de la Terre, etc.). La figure 2 ci-dessous illustre le principe de triangulation appliqué au GNSS.
Les satellites transmettent deux types de données : les codes PRN (Pseudo Random Noise) et les messages de navigation. Les codes PRN sont utilisés pour le calcul des distances récepteur-satellites et permettent d’identifier les satellites. Un même récepteur est ainsi capable de recevoir les signaux de différents satellites. Les messages de navigation contiennent, quant à eux, diverses informations comme la position du satellite émetteur, son état, des données atmosphériques, le paramètre de raccordement de l’horloge du satellite à l’échelle de temps globale de la constellation GNSS. Ces informations permettent en particulier de corriger certaines erreurs affectant le calcul de la distance géométrique parcourue par un signal entre un satellite et le récepteur.
La position des satellites doit être continuellement surveillée afin d’assurer l’exactitude de la mesure GNSS. Pour ce faire, les orbites des satellites sont continuellement contrôlées par le segment sol. Chaque satellite reçoit donc fréquemment des corrections de l’estimation de sa position, qu’il intègre au message de navigation.
Déterminer le temps de trajet de l’onde avec exactitude est également primordial car, sa vitesse de propagation étant proche de celle de la lumière, la moindre erreur sur cette mesure entraine une incertitude importante sur la distance récepteur-satellite calculée. A titre d’exemple, une erreur d’une microseconde sur la mesure du temps de parcours entraine une erreur de 300 m sur le calcul de la distance parcourue par le signal.
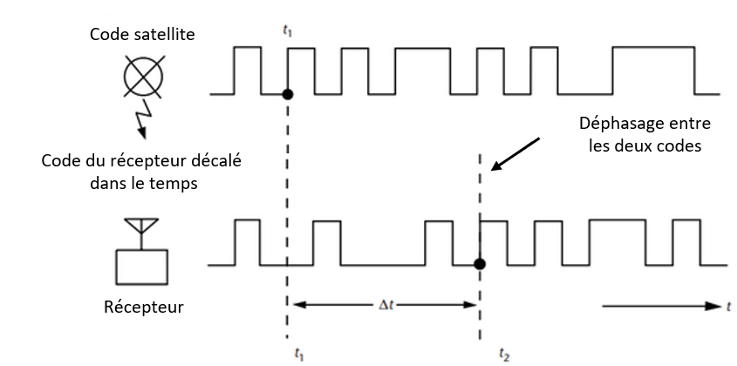
Pour assurer un niveau d’exactitude adéquat des mesures de distance, le récepteur génère tout d’abord les codes émis par chacun des satellites poursuivis, ces codes binaires étant en effet prédéfinis et propres à chaque satellite. L’application du principe d’inter corrélation entre les codes générés et reçus permet au récepteur de déterminer l’époque d’arrivée du signal dans son référentiel. Dès lors, l’écart de temps entre les deux époques peut être calculé. Cet écart de temps, corrigé de la distance géométrique ainsi que d’autres sources d’erreurs, permet de mesurer l’écart de temps entre la référence du récepteur et l’horloge du satellite ou l’échelle de temps de la constellation.
Ainsi, l’exactitude de la mesure du temps de propagation dépend également de la qualité de la corrélation entre les codes émis par le récepteur et les codes correspondants émis par les satellites (voir Figure 3).
La détermination de la position exacte des satellites est également délicate puisque les satellites suivent une trajectoire quasi elliptique. Ainsi, il est également nécessaire de continuellement corriger l’estimation de leurs positions pour assurer la précision requise du calcul de la position du récepteur. Chaque satellite reçoit donc fréquemment la correction de l’estimation de sa position qu’il intègre au « message de navigation » envoyé à l’utilisateur.
3. Principaux systèmes existants
Les signaux GNSS peuvent être fournis par de multiples systèmes, incluant des constellations globales ou régionales et des systèmes d’augmentation SBAS (Satellite-Based Augmentation System) assurant une diffusion de corrections via des satellites géostationnaires.
Les constellations globales actuelles sont les suivantes :
- GPS: Le premier GNSS, totalement opérationnel depuis 1995, est géré par le département de la défense américain. Il est actuellement en cours de modernisation avec le déploiement de nouveaux satellites GPS III ;
- GLONASS: Le GNSS russe, totalement opérationnel depuis 2011, est géré par les forces de défense aérospatiales russe. La dernière génération de satellites, GLONASS-K est entrée en service en février 2016 ;
- Galileo : C’est le système GNSS européen actuellement en cours de déploiement. En plus du service ouvert de haute qualité basé sur des signaux émis dans les bandes E1 et E5, Galileo est également la première constellation GNSS à mettre à disposition un lien retour pour les utilisateurs en détresse. Galileo propose également d’autres capacités uniques comme une fonction d’authentification du message de navigation (OS-NMA) ainsi qu’un signal de navigation crypté mis en œuvre dans un service d’authentification commercial (CAS). OS-NMA et CAS représentent les premières protections contre le leurrage mises à disposition de tous les utilisateurs civils du GNSS. Galileo va également permettre un accès gratuit à un service de haute précision, le HAS (High Accuracy Service). Enfin, Galileo intègre un service régulé, le PRS (Public Regulated Service), réservé aux utilisateurs autorisés par les gouvernements pour les applications sensibles nécessitant un haut niveau de continuité de service ;
- BeiDou (Phase 3) ou BDS-3: Le GNSS chinois est actuellement en cours de déploiement dans le but de remplacer l’actuel système régional. BeiDou est géré par le bureau chinois des satellites de navigation. Avec le système de positionnement régional, BeiDou représente aujourd’hui la plus grande constellation de satellites.
Le tableau ci-dessous détaille les caractéristiques principales des constellations de chacun de ces systèmes :

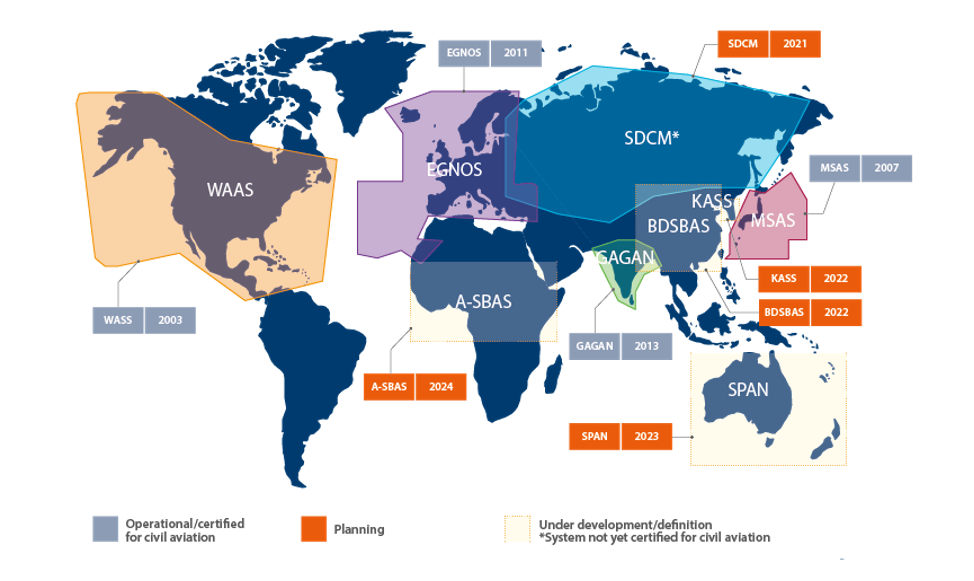
En plus de ces constellations globales, il existe plusieurs systèmes d’augmentation permettant d’augmenter l’exactitude de l’information GNSS. Parmi ces systèmes, les SBAS (Satellite Based Augmentation Systems) délivrent en temps réel des corrections permettant d’accroitre l’exactitude des mesures GNSS tout en garantissant leur intégrité. Initialement développés dans les années 1990 pour introduire le GPS dans le domaine de l’aviation civile, leur utilisation est en train de s’étendre à de nombreux autres secteurs comme le ferroviaire. Il existe aujourd’hui quatre SBAS opérationnels (WAAS aux États-Unis, MASA au Japon, GAGAN en Inde et EGNOS en Europe) et cinq SBAB additionnels en cours de développement (SDCM en Russie, BDSAS en Chine, A-SBAS pour l’ASECNA, KASS en Corée du Sud et SPAN en Australie et Nouvelle-Zélande).
La figure suivante représente ces différents systèmes et leur zone de service :
Les principales caractéristiques des systèmes SBAS sont données par le tableau ci-dessous :

Utilisation du GNSS
1. Synchronisation Temporelle
L’utilisation de systèmes satellitaires (GNSS) pour des applications de synchronisation temporelle est devenue essentielle dans de nombreux secteurs d’activités. Ainsi, ce moyen est par exemple utilisé pour :
- Générer les échelles de temps (notamment UTC) ;
- Synchroniser les horloges des différents éléments d’un même réseau de télécommunication afin de transmettre un flux de données (voix, vidéo, etc.) de manière optimale ;
- Synchroniser les horloges d’éléments de mesures afin de synchroniser les mesures effectuées ;
- Dater des certificats de sécurités et contrôler leurs validités ;
- Synchroniser la datation des informations que reçoivent les serveurs de données d’un même réseau informatique ;
- Synchroniser les systèmes de sureté en particulier dans le domaine du transport ;
- Réaliser des expériences scientifiques.
La synchronisation par système GNSS possède donc un rôle central dans nombre d’applications et secteurs d’activités.
Leur utilisation pour fournir une référence de temps commune aux équipements d’un même réseau peut permettre à la fois :
- Des économies : il n’est plus nécessaire de distribuer une référence de temps par des canaux physiques dédiés (fibres optiques, câbles coaxiaux) qui peuvent être très coûteux à installer et à maintenir pour l’opérateur;
- Une mise en œuvre simple : les récepteurs GNSS fonctionnent de manière indépendante. Distribuer des récepteurs GNSS au sein d’un réseau peut, pour les opérateurs, apparaitre plus simple et plus rapide que de mettre en place un réseau de synchronisation ;
- Un accès à des performances satisfaisantes et compatibles avec les besoins en précision des applications et services les plus exigeants.
De façon plus générale, en plus d’être un élément indispensable au bon fonctionnement d’un même réseau, la synchronisation temporelle sert aussi à interfacer les réseaux entre eux. Les signaux GNSS sont en effet devenus un moyen essentiel, global et standardisé de diffusion d’une source de temps commune pour les opérateurs de réseaux.
Tous ces facteurs ont favorisé l’adoption du GNSS par les opérateurs de réseaux pour la synchronisation temporelle, à un tel point que le GNSS est devenu pour certaines applications un point de défaillance unique.
2. Géolocalisation
Avec la réduction de la taille et la baisse des coûts des récepteurs GNSS, leur utilisation dans le secteur du transport ne cesse de s’amplifier et de se diversifier. Le GNSS est notamment utilisé dans les domaines suivants :
- Transport routier : la géolocalisation par GNSS est utilisée dans le domaine du transport routier pour de nombreuses applications comme la navigation, la gestion de flotte, des applications réglementaires (chronotachygraphe, etc.), la sûreté routière, le suivi de produits dangereux ou le paiement de péages routiers ;
- Véhicule intelligents et autonomes : les véhicules de particuliers deviennent de plus en plus intelligents et autonomes, or ces nouvelles fonctions peuvent nécessiter l’utilisation de système de géolocalisation GNSS. Parmi ces fonctions, on trouve la communication et l’échange de données entre véhicules/infrastructures/piétons (V2V, V2I, V2X), la navigation autonome, l’envoi de messages et d’appels d’urgence (eCall) ou les assurances « Payez-comme-vous-conduisez » ;
- Ferroviaire : les méthodes de gestion du trafic ferroviaire évoluent et le GNSS fait partie intégrante de ces évolutions. En effet, l’Europe est en train de mettre en place des nouvelles solutions de gestion et de signalisation des trains, notamment via le développement du système européen de gestion du trafic ferroviaire, ou ERTMS (European Rail Traffic Management System), qui poussent à l’intégration de solutions de géolocalisation GNSS pour les applications critiques en termes de sureté ;
- Maritime et Fluvial : le secteur du transport maritime se repose de plus en plus sur la géolocalisation GNSS pour la navigation en mer, à proximité des côtes ainsi qu’en voies navigables intérieures. Le système d’identification automatique des navires (AIS) repose sur le positionnement GNSS du navire et le GNSS est aussi utilisé pour la synchronisation du système AIS lui-même ;
- Aviation : le GNSS est employé à la fois pour les phases d’atterrissages et de décollage (par exemple approches LPV200) et de navigation en vol. Le programme de recherche SESAR, pilier du ciel unique Européen, ainsi que le plan de route de l’OACI promeuvent l’utilisation de la géolocalisation par GNSS pour les futurs systèmes du contrôle aérien. Le GNSS pourrait être utilisé pour permettre des descentes et montées continues, la réduction de l’espacement entre les avions ainsi que l’optimisation du réseau de routes.
En plus de ces cinq principaux domaines, de nouvelles applications basées sur l’utilisation de drones sont sur le point ou ont déjà fait leur entrée dans le monde du transport. Parmi ces applications on distingue notamment les drones de livraison (déjà employés pour la livraison de colis ou de médicaments) et les drones taxis (actuellement en test). Que ce soit pour transporter un colis ou une personne, un drone dépend aujourd’hui fortement de la géolocalisation par GNSS pour déterminer sa position et suivre son plan de vol. De plus, un ensemble de services intitulés U-Space Blueprint est étudié par SESAR afin de permettre une intégration sûre des drones dans l’espace aérien notamment par la mise en place d’un système de contrôle du trafic de drones. L’utilisation de la géolocalisation par GNSS est particulièrement envisagée pour de tels systèmes.
Assurer la précision, l’intégrité, la continuité et la disponibilité du service de géolocalisation par GNSS est devenu un enjeu majeur dans le secteur du transport.
[3] https://www.gps.gov/systems/gps/performance/accuracy/
[4] https://www.researchgate.net/publication/228936470_GNSS_Status_and_perspective#pf3
[5] https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SDD_v1.1.pdf
[6] https://gssc.esa.int/navipedia/index.php/Galileo_Performances#cite_note-Galileo_OS_SDD-1
[7] https://directory.eoportal.org/web/eoportal/satellite-missions/content/-/article/cnss
[8] http://www.csno-tarc.cn/en/system/introduction